Hogar
>
Productos > Módulo de telémetro láser > Diseñador de objetivos láser de 1064 nm > 45MJ Láser Target Designator (LTD) WIHT LRF
Productos
nuevos productos




 WIHT LRF")
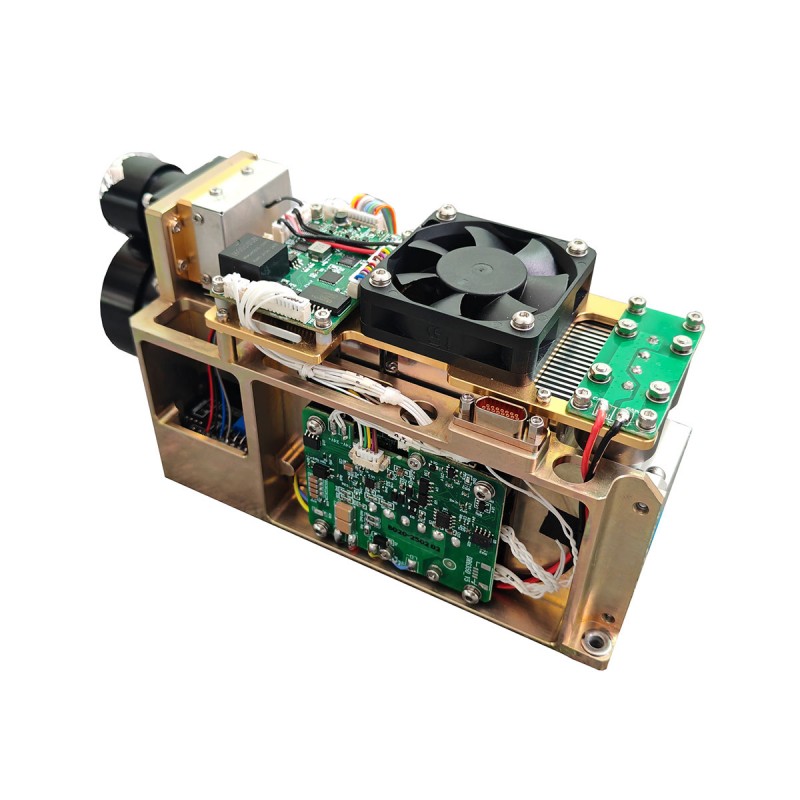
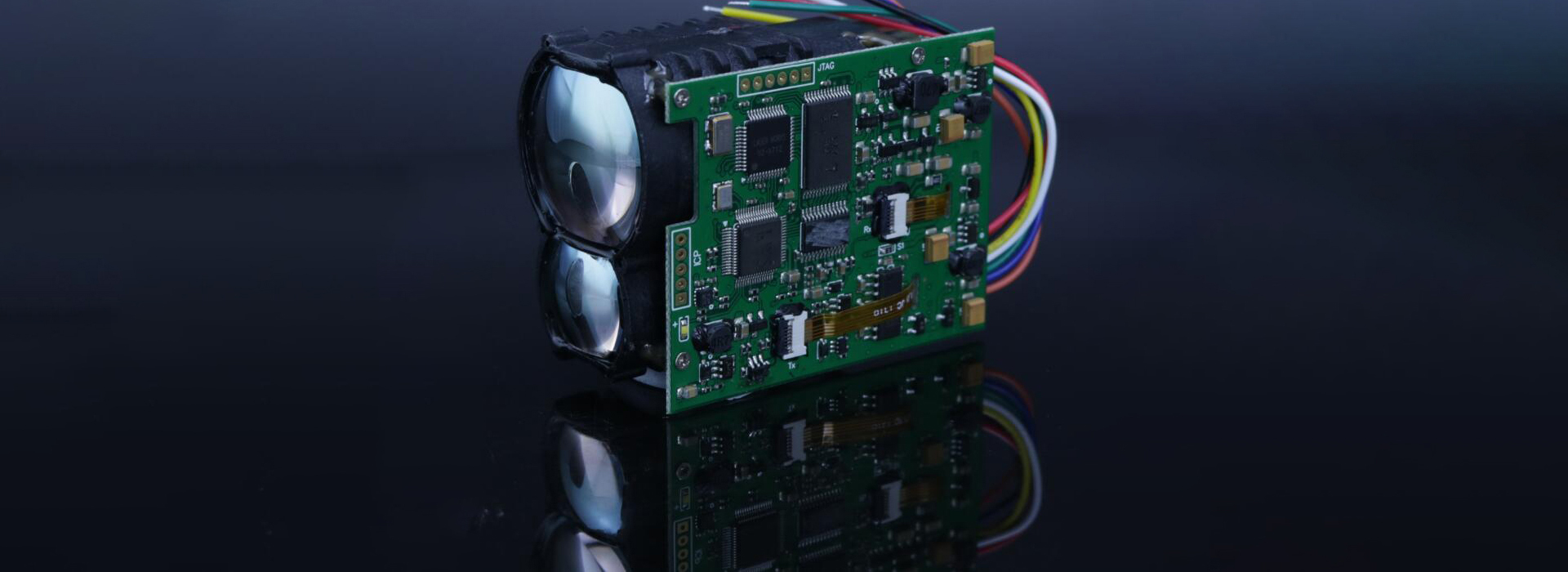
45MJ Láser Target Designator (LTD) WIHT LRF
STA-B45M es un designador de objetivo láser militar de 45MJ que juega un papel crucial en los sistemas de puntería de precisión, capaz de proporcionar una orientación precisa para las municiones inteligentes. A través de un sistema óptico avanzado, marca el objetivo con un haz láser, asegurando que las armas guiadas por precisión puedan destruir el objetivo con una precisión y eficiencia extremadamente alta.
Enviar Consulta
Descripción del Producto
Características del producto
Liviano y miniaturizado
Adaptabilidad ambiental: -40 ℃ ~ 60 ℃ Adaptabilidad de la temperatura de ancho
Adaptabilidad ambiental: -40 ℃ ~ 60 ℃ Adaptabilidad de la temperatura de ancho
Parámetros del indicador del núcleo
Función
a) Tiene la función de establecer el ciclo de irradiación y puede realizar la irradiación láser de acuerdo con el ciclo establecido.
b) Equipado con láser single y funciones de rango repetidas.
c) Equipado con función de rango de múltiples objetivos.
d) Equipado con función de salida de temperatura para los componentes centrales de la cámara.
e) Equipado con función de protección contra sobrecalentamiento para el dispositivo de medición.
f) Equipado con la función de salida de información de estado del dispositivo de iluminación.
a) Tiene la función de establecer el ciclo de irradiación y puede realizar la irradiación láser de acuerdo con el ciclo establecido.
b) Equipado con láser single y funciones de rango repetidas.
c) Equipado con función de rango de múltiples objetivos.
d) Equipado con función de salida de temperatura para los componentes centrales de la cámara.
e) Equipado con función de protección contra sobrecalentamiento para el dispositivo de medición.
f) Equipado con la función de salida de información de estado del dispositivo de iluminación.
Parámetros técnicos
| Modelo | STA-B6445M |
| Longitud de onda láser | 1.06um (usando ND: YAG Crystal, Garantía de selección de diseño) |
| Energía promedio de láser | ≥ 45MJ (fluctuaciones de energía ≤ ± 8%); |
| ángulo de divergencia láser | 0.5mrad |
| Estabilidad del eje óptico de emisión láser | ≤ 0.05mrad |
| El eje óptico de emisión de láser y la instalación del plano base no es paralelo | ≤ 3 '(garantía de diseño); |
| Ancho de pulso láser | 10ns ~ 22ns |
| Max a distancia | Visibilidad ≥ 12 km, rango máximo para medir objetivos de la OTAN ≥ 6 km; |
| Mini a distancia | 100m |
| Frecuencia de repetición de rango | 1Hz/5Hz/Single |
| Rango de precisión | ≤ ± 2m (rms) |
| rango de precisión | ≥ 98% |
| Resolución de distancia | ≤ 50m |
| Tiempo de trabajo de rango continuo | 5 minutos (5Hz: trabajo continuo 5 minutos, descanso ≤ 3 minutos, puede continuar en el rango). |
| Distancia de irradiación máxima | ≥ 5 km |
| Distancia mínima de irradiación | ≤ 500m (con la evaluación del sistema) |
| Ciclo de irradiación continua | 8, cada ciclo dura 25s, con intervalo 15s; Después de 8 ciclos, intervalo de descanso ≤ 20 min; |
| Período del código láser (establecido por protocolo de comunicación) | Rango de ajuste 40 ms ~ 100 ms |
| Precisión de la sincronización de codificación láser | ≤ ± 2 μs |
| Tiempo de inicio del láser | ≤3min |
| Función de sincronización de código extra | Sí |
| Temperatura de trabajo: | -40 ~+60 ℃ |
| Temperatura de almacenamiento | -50 ~+70 ℃ |
| Peso | ≤580g |
| Módulo para ti | 138x75x50 mm |
| con la capacidad de medición multi-objetivo y devuelve tres valor de múltiples objetivos, con la función de paso selectivo de distancia. El código de frecuencia y el código de intervalo variable se pueden establecer (establecido por protocolo de comunicación). | |
Preparación para su uso
Verifique si el voltaje de la fuente de alimentación es de entre 18 V y 32 V. Cuando el voltaje es demasiado bajo (menos de 18 V), el telémetro puede no comunicarse correctamente o indicar "sin salida láser", y cuando el voltaje es demasiado alto (más de 32 V), todo el iluminador puede dañarse permanentemente. Asegúrese de que la corriente de salida nominal del sistema de fuente de alimentación sea mayor que 6A, si es menor que este valor, puede que no haya láser durante la operación. Asegúrese de que la polaridad de la fuente de alimentación esté conectada correctamente, existe un riesgo de daño al equipo si la polaridad se invierte. Consulte el Apéndice A para las definiciones de enchufes de la fuente de alimentación.
Precauciones para su uso
A) El láser emitido por este telémetro es un láser de longitud de onda sin seguridad de 1.06 µm, evite la luz directa del láser a los ojos cuando se usa.
b) Al ajustar el paralelismo del eje óptico, asegúrese de bloquear la lente receptora; de lo contrario, el detector se dañará permanentemente debido al fuerte eco.
c) Este módulo del telémetro no es aire, asegúrese de utilizar el entorno La humedad relativa es inferior al 80%y garantizar que el uso de la limpieza y la higiene ambiental, para no dañar el láser.
D) El rango del telémetro está relacionado con la visibilidad atmosférica y la naturaleza del objetivo, en el caso de la niebla, la lluvia y el viento y la arena, el rango reducirá el rango. Los objetivos como los grupos de hojas verdes, las paredes blancas y la piedra caliza expuesta tienen una mejor reflectividad y pueden aumentar el rango. Además, un aumento en la inclinación del objetivo al haz láser reducirá el rango.
e) Está estrictamente prohibido disparar el haz láser a objetivos fuertemente reflectantes, como el vidrio y las paredes blancas a 100 metros para evitar ecos fuertes, lo que puede causar daños al detector APD.
f) Está estrictamente prohibido desconectar o enchufar el cable mientras está energizado.
g) Asegúrese de que la polaridad de potencia esté correctamente conectada, de lo contrario provocará daños permanentes en el dispositivo.
b) Al ajustar el paralelismo del eje óptico, asegúrese de bloquear la lente receptora; de lo contrario, el detector se dañará permanentemente debido al fuerte eco.
c) Este módulo del telémetro no es aire, asegúrese de utilizar el entorno La humedad relativa es inferior al 80%y garantizar que el uso de la limpieza y la higiene ambiental, para no dañar el láser.
D) El rango del telémetro está relacionado con la visibilidad atmosférica y la naturaleza del objetivo, en el caso de la niebla, la lluvia y el viento y la arena, el rango reducirá el rango. Los objetivos como los grupos de hojas verdes, las paredes blancas y la piedra caliza expuesta tienen una mejor reflectividad y pueden aumentar el rango. Además, un aumento en la inclinación del objetivo al haz láser reducirá el rango.
e) Está estrictamente prohibido disparar el haz láser a objetivos fuertemente reflectantes, como el vidrio y las paredes blancas a 100 metros para evitar ecos fuertes, lo que puede causar daños al detector APD.
f) Está estrictamente prohibido desconectar o enchufar el cable mientras está energizado.
g) Asegúrese de que la polaridad de potencia esté correctamente conectada, de lo contrario provocará daños permanentes en el dispositivo.
Definición de enchufes de interfaz
Tabla 1 Definición de interfaces externas
Tabla 1 Definición de interfaces externas
| Número de orden | Tipo de interfaz | Pigmento | Definición | Observaciones |
| 1 | Definición de la interfaz DB9 | Palmera | Rs422 t+ | Interfaz de comunicación rs422 |
| 2 | Púrpura | Rs422 t- | ||
| 3 | Amarillo | Rs422 r- | ||
| 4 | Verde | RS422 R+ | ||
| 5 | Blanco | Gnd | ||
| 6 | Ceniza | Gatillo externo- | Nivel RS422 | |
| 7 | Azul | Disparador externo + | ||
| 8 | Definición de interfaz de alimentación | Negro | VCC+ | DC 18V ~ 32V |
| 9 | Rojo | VCC- |
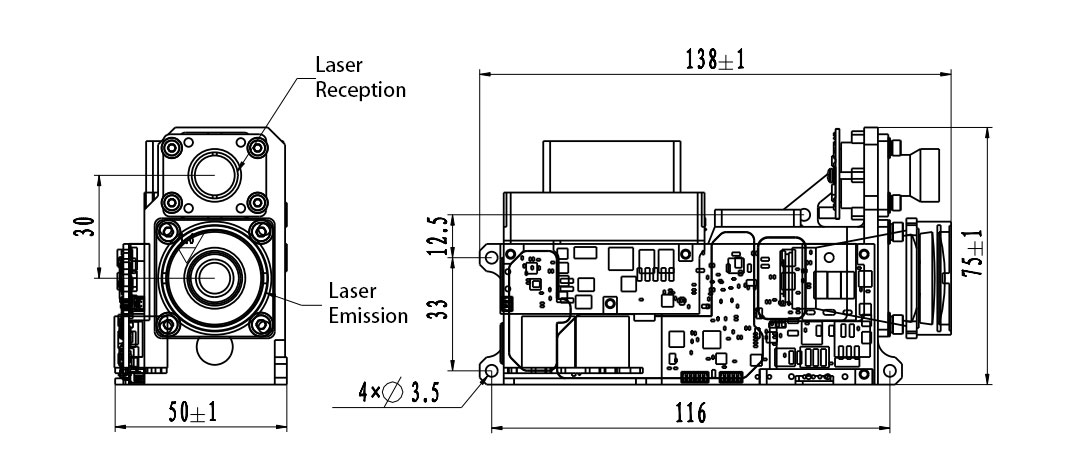
Figura 2 Diagrama de tamaño bidimensional del producto
Protocolo de comunicación de interfaz
1. Formato de comunicación:
a) La tasa de baudios predeterminada es 115200bps.
b) Formato de datos: datos de 8 bits, un bit de inicio, un bit de parada, sin verificación de paridad, datos consisten en byte de encabezado, parte del comando, longitud de datos, parte del parámetro y byte de verificación.
2. Modo de comunicación:
a) El maestro y el dispositivo de medición usan el modo de comunicación del esclavo maestro, en el que el maestro envía comandos de control al dispositivo de medición y el dispositivo de medición recibe y ejecuta las instrucciones. En el estado de rango, el dispositivo de medición envía los datos y el estado del dispositivo de medición a la computadora superior de acuerdo con el período de rango, y el formato de comunicación y el contenido de comando se muestran en la siguiente tabla.
b) Después de que el maestro envíe el comando de control, el medidor responde continuamente con tres comandos de respuesta. Si el maestro no recibe el comando de respuesta del medidor dentro del límite de tiempo, lo reenviará nuevamente.
El formato del mensaje que se enviará es el siguiente
a) La tasa de baudios predeterminada es 115200bps.
b) Formato de datos: datos de 8 bits, un bit de inicio, un bit de parada, sin verificación de paridad, datos consisten en byte de encabezado, parte del comando, longitud de datos, parte del parámetro y byte de verificación.
2. Modo de comunicación:
a) El maestro y el dispositivo de medición usan el modo de comunicación del esclavo maestro, en el que el maestro envía comandos de control al dispositivo de medición y el dispositivo de medición recibe y ejecuta las instrucciones. En el estado de rango, el dispositivo de medición envía los datos y el estado del dispositivo de medición a la computadora superior de acuerdo con el período de rango, y el formato de comunicación y el contenido de comando se muestran en la siguiente tabla.
b) Después de que el maestro envíe el comando de control, el medidor responde continuamente con tres comandos de respuesta. Si el maestro no recibe el comando de respuesta del medidor dentro del límite de tiempo, lo reenviará nuevamente.
El formato del mensaje que se enviará es el siguiente
| Stx0 | CMD | Fila | Datos 1H | Data1l | Chk |
Tabla 2 Descripción del formato del mensaje enviado
| número de orden | nombre | explicar | código | observaciones |
| 1 | Stx0 | Mensaje de inicio de la bandera | 55 (h) |
|
| 2 | CMD | CW | Ver Tabla 3 |
|
| 3 | Fila | DL | El número de todos los bytes excepto la marca de inicio, la palabra de comando y la suma de verificación |
|
| 4 | Datah | parámetro | Ver Tabla 3 |
|
| 5 | llegada |
|
||
| 6 | Chk | VERIFICACIÓN XOR | Excepto por el byte válido, todos los demás bytes se xoren |
|
El comando se describe de la siguiente manera:
Tabla 3 Descripción de comandos y palabras de datos enviadas por el maestro al medidor
Tabla 3 Descripción de comandos y palabras de datos enviadas por el maestro al medidor
| número de orden | CW | función | byte de datos | observaciones | longitud | Código de ejemplo |
| 1 | 0x00 | Detente (deja de alcanzar la iluminación) | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes | 55 00 02 00 00 57 |
| 2 | 0x01 | Soltero | D1 = 00 (H) D0 = 00 (H) | El dispositivo de medición recibe una sola instrucción de rango, realiza una operación de rango y carga el valor de distancia de rango al mismo tiempo; | Seis bytes | 55 01 02 00 00 56 |
| 3 | 0x02 | Continuo rango | D1 = xx (h) d0 = yy (h) | Según el período de rango establecido, el valor de distancia de alcance se carga continuamente. Los datos expresan el período de rango, y la unidad es MS | Seis bytes | 55 02 02 03 E8 BE (1Hz de alcance) |
| 4 | 0x03 | comprobante | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes | 55 03 02 00 00 54 |
| 5 | 0x04 | Configuración de zona ciega | D1 = xx (h) d0 = yy (h) | Los datos describen el valor de la zona ciega, la unidad 1m, y establece la pantalla de distancia dentro de la zona ciega a 0; | Seis bytes | 55 04 02 01 2C 7e (300m es la distancia más cercana) |
| 6 | 0x06 | Número acumulativo de consultas de salida de luz | D1 = 00 (H) D1 = 00 (H) | APAGAR ALMACENAMIENTO; | Seis bytes | 55 06 02 00 00 51 |
| 7 | 0x31 | Establecer el código preciso | D4 d3 ~ d0 | D4: Número de código preciso, grupos incorporados 8, numerados 1 ~ 8; D3 ~ D0 representa el período de pulso, Unidad Usrange: 45000 ~ 60000 | Nueve bytes | 55 31 05 01 00 00 C3 50 F3 (número de código preciso: 1 ciclo: 0000c350 = 50000US) |
| 8 | 0x32 | Establecer códigos de intervalos variables | D33 (Ref.) D32 (número de bits de codificación) D31 ~ D30 (intervalo de tiempo entre el último bit 0) D29 ~ D28 (intervalo de tiempo entre bit 14 y bit 15) D27 ~ D26 (intervalo de tiempo bit13 bit14) d25 ~ d24 (intervalo de tiempo entre bit 12 y bit 13) D23 ~ D22 (intervalo de tiempo entre bit13 bit14) bit10 bit11) d19 ~ d18 (intervalo de tiempo entre bit9 bit10) d17 ~ d16 (intervalo de tiempo entre bit8 bit9) d15 ~ d14 (intervalo de tiempo entre bit7 bit8) d13 ~ d12 (intervalo de tiempo entre bit6 y bit7) d11 ~ d10 (intervalo de tiempo entre bit5 bit6) d9 ~ d8 (intervalo de tiempo bit4 5) d7 ~ d6 (intervalo de tiempo entre bit6 bit6) bit4) d5 ~ d4 (intervalo de tiempo entre bit2 bit3) d3 ~ d2 (intervalo de tiempo entre bit1 bit2) d1 ~ d0 (intervalo de tiempo entre bit0 y bit1) | D33: Número de código de intervalo variable, grupos incorporados 16, el rango de números es 1 ~ 16; D32: número de bits de codificación, que varían de 3 a 16 veces la unidad de intervalo Usrange: 45000 ~ 60000 | 38 bytes |
|
| 9 | 0x33 | Configuración de códigos pseudo-aleatorios | D4 d3 ~ d0 | D4: Codificación de código pseudo-aleatorio, con 2 grupos incorporados, numerados de 1 a 2; D3: Longitud del código pseudo-aleatorio, que oscila entre 2 a 16d2 D1: valor inicial del código pseudo-aleatorio, que se toma de la broca inferior de acuerdo con la longitud de la codificación de pseudo-random: Standby, establecido 0 | Nueve bytes | 55 33 05 01 10 AA AA 00 72 (Número de código pseudo-aleator |
| 10 | 0x41 | Establezca la consulta para códigos de precisión | D1 D0 | D1: Número de código preciso, el rango de números es 1 ~ 8d0: en espera, establecido 0 | Seis bytes | 55 41 02 01 00 13 Establezca la consulta para el código de precisión 1 |
| 11 | 0x42 | Establezca la consulta para códigos de intervalo variables | D1 D0 | D1: número de código de intervalo variable, el rango de números es 1 ~ 16d0: en espera, establecido 0 | Seis bytes | 55 42 02 01 00 14 Establezca la consulta para la codificación variable 1 |
| 12 | 0x43 | Configure una consulta para los códigos pseudo-aleatorios | D1 D0 | D1: número de código pseudo-aleatorio, el rango de números es 1 ~ 2d0: en espera, establecido 0 | Seis bytes | 55 43 02 01 00 15 Ajuste la consulta con codificación de pseudo-aleatorio 1 |
| 13 | 0x44 | Configuración de tiempo de trabajo de irradiación continua | D1 = 00 (H) D0 = yy (H) | Yy tiempo de irradiación continua se refiere al tiempo de trabajo continuo del medidor bajo el modo de irradiación continua, Unidad s. La parada automática se detendrá después del tiempo de espera | Seis bytes | 55 44 02 00 3C 2Fcontinuous Time Working 60s |
| 14 | 0x45 | Consulta de tiempo de trabajo de irradiación continua | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes | 55 45 02 00 00 12 |
| 15 | 0x30 | Irradiación de código preciso | D3 ~ d0 | D3: Modo de irradiación, 00 Irradiación continua, 01 Irradiación PeriódicaD2: 01 Código preciso Irradiaciónd1: Código preciso Número de código: en espera 00 | Ocho bytes | 55 30 04 00 01 01 00 61code 1, iluminación continua de código preciso |
| Irradiación del código de intervalo variable | D3 ~ d0 | D3: modo de irradiación, 00 irradiación continua; 01 Irradiación periódicad2: 02 Código de intervalo variable Irradiationd1: Código de intervalo variable Número de Número | Ocho bytes | 55 30 04 00 02 01 00 62code 1, código de intervalo variable irradiación continua | ||
| Irradiación sincrónica externa | D3 ~ d0 | D3: 00 La sincronización externa es solo iluminación continua de Iradiación Síncrona Externa1: 00d0: 00 | Ocho bytes | 55 30 04 00 03 00 00 62 | ||
| Irradiación del código pseudo-aleatorio | D3 ~ d0 | D3: modo de irradiación, 00 irradiación continua; 01 Irradiación periódicad2: 04 Irradiación de código pseudo-aleatorio | Ocho bytes | 55 30 04 00 04 01 00 64code 1, código pseudo-aleatorio irradiación continua | ||
| 16 | 0x24 | Configuración de parámetros de irradiación periódica | D2 D1 D0 | D2: Número de ciclos de trabajo1: tiempo de trabajo por ciclo, unidad SD0: tiempo de descanso por ciclo, en S | Siete bytes | 55 24 03 08 14 0a 64 (8 ciclos, 20s trabajo y 10s descanso por ciclo) |
| 17 | 0x25 | Consulta de parámetros de irradiación periódica | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes | 55 25 02 00 00 72 |
| 18 | 0xeb | Consulta de número de equipo | D1 = 00 (H) D0 = 00 (H) |
|
Seis bytes | 55 EB 02 00 00 BC |
| 19 | 0x51 | Modo de depuración | D1 D0 | D1: 01 Ingrese el modo de depuración, 00 Salida de depuración Moded0: Standby | Seis bytes | 55 41 02 01 00 17 Modo de depuración de 17 Enter55 41 02 00 00 Modo de depuración de 16XIT |
|
|
|
|
|
|
|
|
a) El control principal recibe formato
El formato del mensaje recibido es el siguiente:
El formato del mensaje recibido es el siguiente:
| Stx0 | CMD | Fila | Datos | Fecha0 | Chk |
Tabla 4 Descripción del formato de los mensajes recibidos
| número de orden | nombre | explicar | código | observaciones |
| 1 | Stx0 | Mensaje Inicio Flager 1 | 55 (h) |
|
| 2 | Cmd_jg | Palabra de comando de datos | Ver Tabla 5 |
|
| 3 | Fila | DL | El número de todos los bytes, excepto la marca de inicio, la palabra de comando y la suma de verificación |
|
| 4 | Dn | parámetro | Ver Tabla 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | VERIFICACIÓN XOR | Excepto por el byte válido, todos los demás bytes se xoren |
|
Control principal Recibir el estado Descripción:
La Tabla 5 describe la palabra de datos enviada por el medidor al maestro
La Tabla 5 describe la palabra de datos enviada por el medidor al maestro
| número de orden | CW | Comentarios de la función (correspondiente al comando de control recibido por el dispositivo de medición) | byte de datos | observaciones | longitud total |
| 1 | 0x00 | Detente (deja de alcanzar la iluminación) | D1 = 00 (H) D0 = xx (H) | XX: 00 Stop01 normal parada a alta temperatura02 parada cuando está atrasado | Seis bytes |
| 2 | 0x03 | comprobante | D8 ~ D0C5 ~ C0B2 ~ B0 | D8-D7 (INT Tipo): retroalimentación de valor de voltaje -5V, unidad 0.01V.D6-D5: retroalimentación del valor de configuración de punto ciego, unidad 1MD4-D3: APD Alto voltaje de retroalimentación, Unidad V; D2: Tipo de char, indicando la temperatura del entorno de control principal (entorno), Unidad: grados Celsius; D1-D0: +5V Voltaje Comentarios, Unidad 0.01VC5-C4: Conjunto de corriente de la unidad de transmisión real: retroalimentación del valor de corriente de accionamiento en la unidad AC1-C0: Control de temperatura Temperatura Furraje Unidad 0.1 ℃ B2: Estado de control de temperatura de la unidad (8 bits) Bit0: 0 Control de temperatura a la temperatura 1 No alcanzado BitBit1: 0 El control de temperatura es normal 1 El control de temperatura es OvercurrentBit2: la corriente de accionamiento normal es normal 1. Corriente de la corriente de transmisión de la transmisión de la corriente y el valor de la corriente de transmisión de la transmisión de la transmisión y el valor de la corriente de transmisión es el valor de la corriente de transmisión de la transmisión. es mayor que 5AB1: el estado de comunicación de la unidad (midiendo el estado de comunicación entre la placa de control principal y el módulo de accionamiento) 0 es normal y 1 es failbit0: establezca si la corriente es exitosa bit1: si el ancho del pulso está establecido exitosamente Bit2: Establezca si el desencadenante externo es exitoso 3: si el controlador comienza con éxito 4: si el estatus de la comunicación del controlador de la comunicación es exitoso: el estatus de comunicación: La placa de control principal y el módulo de control de temperatura) 0 es normal y 1 es fallas de fallas: si el inicio de control de temperatura es exitosobit1: si la parada de control de temperatura es exitosabit2: si la configuración de temperatura es exitosabit3: si la consulta de control de temperatura es exitosabit4: SEVEBIT5: SEVEBIT6: SEVEBIT7: SEVE | 22 bytes |
| 3 | 0x04 | Configuración de zona ciega, Unidad M | D1 D0 | Los datos describen el valor de distancia más cercano, unidad 1m; arrancar alto y finalizar bajo | Seis bytes (ahorro de energía de caída) |
| 4 | 0x06 | Número acumulativo de consultas de salida de luz | D3 ~ d0 | Los datos expresan el número de luces, 4 bytes, con el byte alto primero | Ocho bytes |
| 5 | 0x31 | Establecer el código preciso | D4 d3 ~ d0 | D4: Número de código preciso, rango 1 ~ 8d3 ~ D0 representa el período, Unidad Usrange: 45000 ~ 60000 | Nueve bytes |
| 6 | 0x32 | Establecer códigos de intervalos variables | D1 D0 | D1 D1 Código de intervalo variable El rango de número de número de código 1 ~ 16d0 00 se establece correctamente, y 01 se establece fallado | Seis bytes |
| 7 | 0x33 | Establecer un código pseudo-aleatorio | D1 D0 | D1 El rango de número de código pseudo-random 1 ~ 2d0 00 se establece correctamente, y 01 se establece fallado | Seis bytes |
| 8 | 0x41 | Consulta de ciclo de código preciso | D4 d3 ~ d0 | D4: Número de código preciso, rango 1 ~ 8d3 ~ D0 representa el período, Unidad Usrange: 45000US ~ 60000US | Nueve bytes |
| 9 | 0x42 | Consulta del código de intervalo variable | D33 (ref.)D32 (number of coding bits)D31~D30 (time interval between the last bit 0)D29~D28 (time interval between bit14 bit15)D27~D26 (time interval between bit13 bit14)D25~D24 (time interval between bit 12 and bit 13)D23~D22 (time interval between bit 11 and bit 12)D21~D20 (time interval Entre el bit 10 y el bit 11) D19 ~ D18 (intervalo de tiempo entre bit9 y bit10) d17 ~ d16 (intervalo de tiempo entre bit8 bit9) d15 ~ d14 (intervalo de tiempo entre bit 7 y bit 8) d13 ~ d12 (intervalo de tiempo entre bit6 bit6) d11 ~ d10 (intervalo de tiempo entre bit5 bit6) d9 ~ d8 (intervalo de tiempo entre 4 y bit5) bit3 bit4) d5 ~ d4 (intervalo de tiempo entre bit2 bit3) d3 ~ d2 (intervalo de tiempo entre bit1 bit2) d1 ~ d0 (intervalo de tiempo entre bit0 bit1) |
|
38 bytes |
| 10 | 0x43 | Consulta de código pseudo-aleatorio | D4 d3 ~ d0 | D4: Codificación de código pseudo-aleatorio, rango 1 ~ 2d3: longitud del código pseudo-aleatorio, que varía de 2 a 16d2 d1: valor inicial del código pseudo-aleatorio, que se toma de la broca de acuerdo con la longitud del pseudo-random codificado: en espera, establecido 0 | Nueve bytes |
| 11 | 0x44 | Configuración de tiempo de trabajo de irradiación continua | D1 = 00 (H) D0 = yy (H) | Yy tiempo de irradiación continua, unidad s, tiempo de espera automáticamente detenerse | Seis bytes |
| 12 | 0x45 | Consulta de tiempo de trabajo de exposición continua | D1 = 00 (H) D0 = yy (H) | Yy tiempo de irradiación continua, unidad s, tiempo de espera automáticamente detenerse | Seis bytes |
| 13 | 0x24 | Configuración de parámetros de irradiación periódica | D2 D1 D0 | D2: Número de ciclos de trabajo1: tiempo de trabajo por ciclo, unidad SD0: tiempo de descanso por ciclo, en S | Siete bytes |
| 14 | 0x25 | Consulta de parámetros de irradiación periódica | D2 D1 D0 | D2: Número de ciclos de trabajo1: tiempo de trabajo por ciclo, unidad SD0: tiempo de descanso por ciclo, en S | Siete bytes |
| 15 | 0xeb | Consulta de número de equipo | D15 ~ D0 | D15 ~ D12: Modelo de productoD11 D10: Número de producto D8: Versión de software D6: Ajuste Q NúmeroD5 D4: Número de unidad D2: Número de láser D0: ID de FPGA | 20 bytes |
| 16 | 0x51 | Modo de depuración | D1 D0 | D1: 01 Ingrese el modo de depuración, 00 Salida de depuración Moded0: Standby | Seis bytes |
| 17 | 0x01 | Soltero | D9d8 d7 d6d5 d4 d3d2 d1 d0b4 b3 b2 b1 | D9 (bit7-bit0) byte de bandera: D9 es la séptima posición que indica la onda principal; 1: hay una onda principal, 0: ninguna onda principal. D9 es la sexta posición que indica eco; 1: Hay Echo, 0: no ECHOD9 El quinto bit indica el estado del láser; 1: láser normal, 0: láser faultd9 no es válido (establecido en 0) en la cuarta posición; d9 no es válido en la tercera posición (establecida en 0); d9 La segunda posición indica el estado APD; 1: Normal, 0: Errord9 es la primera posición que indica si hay un objetivo anterior; 1: Hay un objetivo, 0: ningún objetivo (el objetivo antes del objetivo principal es el objetivo anterior y el objetivo en el área ciega) .D9 El bit 0 indica si hay un objetivo posterior; 1: Hay un objetivo, 0: no hay un objetivo (el objetivo después del objetivo principal es el objetivo posterior) D8-D6 Distancia del primer objetivo (Unidad 0.1M) Distancia D5-D3 a la segunda distancia del tercer objetivo D2-D0 D2-D0 (Unidad 0.1M) 3. Los objetivos son de cerca de FARB4 y B3 indican valores de alta presiónb2 indica que el valor de corriente de accionamientob1 B0 indica la temperatura del láser | 19 bytes |
| 18 | 0x02 | Continuo rango | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (bit7-bit0) byte de bandera: d9 es la séptima posición que indica la onda principal; 1: hay una onda principal, 0: ninguna onda principal. D9 es la sexta posición que indica eco; 1: Hay Echo, 0: no ECHOD9 El quinto bit indica el estado del láser; 1: láser normal, 0: láser faultd9 no es válido en la cuarta posición (establecida en 0); d9 no es válido en la tercera posición (establecida en 0); d9 La segunda posición indica el estado APD; 1: Normal, 0: Errord9 es la primera posición para indicar si hay un objetivo anterior; 1: Hay un objetivo, 0: no hay un objetivo (el objetivo antes del objetivo principal es el objetivo anterior y el objetivo en el área ciega) .D9 El bit 0 indica si hay un objetivo posterior; 1: Hay un objetivo, 0: no hay un objetivo (el objetivo después del objetivo principal es un objetivo posterior) D8-D6 Distancia del primer objetivo (Unidad 0.1M) Distancia D5-D3 a la segunda distancia del tercer objetivo D2-D0 D2-D0 (Unidad 0.1M) 3. Los objetivos son de cerca de FARB4 y B3 indican que el valor de alta presión APDb2 indica que el valor de corriente de accionamiento B0 representa la temperatura del láser | 19 bytes |
| 19 | 0x30 | brillante | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (bit7-bit0) byte de bandera: d9 es el séptimo bit para indicar la onda principal; 1: hay una onda principal, 0: ninguna onda principal. D9 es la sexta posición que indica eco; 1: Hay Echo, 0: no ECHOD9 El quinto bit indica el estado del láser; 1: láser normal, 0: láser faultd9 no es válido en la posición 4 (establecido en 0) d9 no es válido en la tercera posición (establecida en 0); d9 La segunda posición indica el estado APD; 1: Normal, 0: Errord9 es la primera posición para indicar si hay un objetivo anterior; 1: Hay un objetivo, 0: ningún objetivo (el objetivo antes del objetivo principal es el objetivo anterior y el objetivo en el área ciega) .D9 El bit 0 indica si hay un objetivo posterior; 1: hay un objetivo, 0: no hay un objetivo (el objetivo después del objetivo principal es el objetivo posterior) D8-D6 Distancia del primer objetivo (Unidad 0.1M) Distancia D5-D3 a la segunda distancia del tercer objetivo D2-D0 D2-D0 (Unidad 0.1M) 3. Los objetivos son de cerca de FARB4 y B3 indican que el valor de alta presión APDb2 indica que el valor de corriente de accionamiento B0 representa la temperatura del láser | 19 bytes |
| 20 | 0xec | Un error de instrucción | D1 = 00 d0 = 00 | El comando de retroalimentación de la cámara es incorrecto | Seis bytes |
| 21 | 0XEE | Errores de efectividad | D1 = 00 d0 = 00 | La retroalimentación de la cámara es incorrecta | Seis bytes |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Nota: ① Byte/bit de datos indefinidos, el valor predeterminado es 0; | |||||
Etiquetas calientes: 45MJ Designator de Target de Target (LTD) con LRF, fabricantes, proveedores, fábrica, China, hecha en China, personalizada y de alta calidad
Categoría relacionada
Módulo de buscador de rango láser de 905 nm
Módulo de buscador de rango láser de 1535 nm
Módulo de buscador de rango láser de 1570 nm
1.54um módulo de telémetro láser
Diseñador de objetivos láser de 1064 nm
Módulo STSTEM contra el dron
Módulo Lidar de alcance
Enviar Consulta
Por favor, siéntase libre de dar su consulta en el siguiente formulario. Le responderemos en 24 horas.




 WIHT LRF")