Hogar
>
Productos > Giroscopio de fibra óptica > Giroscopio de fibra óptica > Fibra óptica Giroscope-accelerómetro y sistema de navegación integrado GNSS
Productos
nuevos productos





Fibra óptica Giroscope-accelerómetro y sistema de navegación integrado GNSS
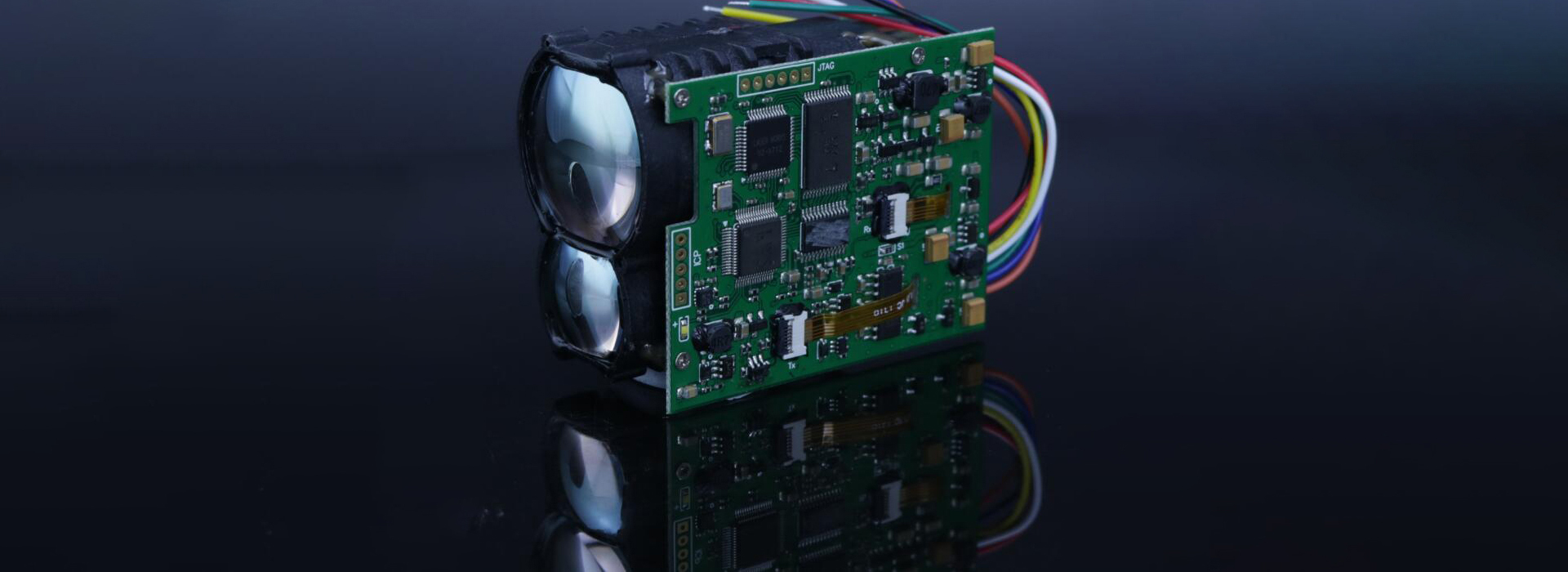
The Fiber optic gyroscope-Accelerometer and GNSS Integrated Navigation System JIO-D300S is based on cost-effective closed-loop fiber optic gyroscope,accelerometer and high-end GNSS receiving board, through multi-sensor fusion and navigation solution algorithm implementation to meet the needs of medium and high-precision mobile measurement systems, large UAVs, etc.The application field requires accurate measurement of actitud, encabezado e información de posición.
Modelo:JIO-D300S
Enviar Consulta
Descripción del Producto
El acelerómetro de giroscopio de fibra óptica y el sistema de navegación integrado GNSS tienen un modo de navegación inercial/satelital combinado y un modo inercial puro.
Los satélites que pueden ser recibidos por el receptor GNSS en el modo de navegación integrado inercial/satelital información de posicionamiento de satélite para navegación combinada; Posición de solución inercial de salida después de perder la actitud de velocidad de la señal, con precisión de posicionamiento a nivel de medidor en poco tiempo.
Una vez que se inicia el modo de inercia pura, tiene la función de la medición de actitud precisa y puede generar el rodamiento y el encabezado de tono, la inercia pura puede buscar estáticamente al norte.
Instalación de Jioptics de Gyroscope de fibra óptica para proporcionar facilidad de flexibilidad de integración, y nuestro kit de herramientas de desarrolladores para obtener prototipos rápidos, no solo cumplen con los requisitos de especificación, también proporciona un rendimiento de alta calidad que satisface la demanda de usuarios finales.
Los satélites que pueden ser recibidos por el receptor GNSS en el modo de navegación integrado inercial/satelital información de posicionamiento de satélite para navegación combinada; Posición de solución inercial de salida después de perder la actitud de velocidad de la señal, con precisión de posicionamiento a nivel de medidor en poco tiempo.
Una vez que se inicia el modo de inercia pura, tiene la función de la medición de actitud precisa y puede generar el rodamiento y el encabezado de tono, la inercia pura puede buscar estáticamente al norte.
Instalación de Jioptics de Gyroscope de fibra óptica para proporcionar facilidad de flexibilidad de integración, y nuestro kit de herramientas de desarrolladores para obtener prototipos rápidos, no solo cumplen con los requisitos de especificación, también proporciona un rendimiento de alta calidad que satisface la demanda de usuarios finales.
Nuestros servicios
Jioptics es un equipo profesional y eficiente. Proporcione servicios OEM/ODM para usted, contáctenos para personalizar su exclusivo giroscopio de fibra óptica
Características del producto
- Precisión de posición hasta nivel de centímetro
- Error de medición de actitud mejor que 0.01 °
- Rango de temperatura de funcionamiento: -40 ~ 60 ℃
- Entorno de vibración: 20 ~ 2000Hz, 3.03g
- Tipos de interfaz ricos, soporte RS232, RS422, CAN y otras interfaces estándar
- Tiempo medio entre fallas de hasta 30000 h
- Error de medición de actitud mejor que 0.01 °
- Rango de temperatura de funcionamiento: -40 ~ 60 ℃
- Entorno de vibración: 20 ~ 2000Hz, 3.03g
- Tipos de interfaz ricos, soporte RS232, RS422, CAN y otras interfaces estándar
- Tiempo medio entre fallas de hasta 30000 h
Características eléctricas
- Fuente de alimentación: entrada de voltaje ancho 12 ~ 36V
- Potencia nominal: 24W (Max)
- Potencia nominal: 24W (Max)
Dimensiones mecánicas

Indicadores técnicos
| Parámetro | Atributos | Valor típico | Unidad |
| Precisión de la posición | Punto único (RMS) | 1.2 | m |
| RTK (RMS) | 2cm+1ppm |
|
|
| Postprocesamiento (RMS) | 1 cm+1ppm |
|
|
| Pérdida de la precisión del bloqueo (CEP) | 2NM① |
|
|
| Encabezado (rms) | Precisión combinada | 0.1② | º |
| Postprocesamiento | 0.01 | º | |
| Pérdida de precisión de retención de bloqueo | 0.02① | º | |
| Precisión de la búsqueda del norte | 0.2③ | ºCl | |
| Actitud (rms) | Precisión combinada | 0.01 | º |
| Postprocesamiento | 0.006 | º | |
| Pérdida de precisión de retención de bloqueo | 0.02① | º | |
| Precisión de velocidad horizontal (RMS) |
|
0.05 | EM |
| Precisión de tiempo |
|
20 | ns |
| Frecuencia de salida de datos |
|
200④ | Hz |
| Girosía | Rango | 300 | º / s |
| Estabilidad de sesgo cero | 0.02⑤ | º/H | |
| Factor de escala | 50 | PPM | |
| Caminata aleatoria de la esquina | 0.005 | º/√hr | |
| Acelerómetro | Rango | 16 | g |
|
|
Estabilidad de sesgo cero | 50⑤ | μg |
| Factor de escala | 50 | PPM | |
| Caminata aleatoria de velocidad | 0.01 | m/s/√hr |
Caminata aleatoria de velocidad
| Parámetro | Atributos | Referencia | Unidad |
| Tamaño físico | Tamaño | 176.8 × 188.8 × 117 | mm3 |
| Peso | <5 | kg | |
| Características eléctricas | Voltaje nominal | 12 ~ 36 | V |
| Potencia nominal | 24 (estado estacionario) | W | |
| Memoria | Reservado |
|
|
| Indicadores ambientales | Temperatura de funcionamiento | -40 ~+60 | ℃ |
| Temperatura de almacenamiento | -45 ~+70 | ℃ | |
| Vibración aleatoria | 3.03 (20 ~ 2000Hz) | g | |
| MTBF | 30000 | h | |
| Características de la interfaz |
|
PPS, Evento, RS232, RS422, CAN (opcional) |
|
|
|
Puerto de red (reservado), puerto de antena, puerto del sensor de velocidad de la rueda |
|
|
| Nota: ① La alineación es válida y el bloqueo se pierde durante 60 minutos; ② Las condiciones del vehículo, deben ser maniobradas; ③Ta alineación de posposición, alineación de 15 minutos, la diferencia entre las dos posiciones es mayor de 90 grados; ④ Salida única 200Hz; ⑤10s promedio. |
|||
Etiquetas calientes: Sistema de navegación integrado Gyroscope-ACCelerómetro GNSS, fabricantes, proveedores, fábrica, China, hecha en China, personalizada y de alta calidad
Categoría relacionada
Enviar Consulta
Por favor, siéntase libre de dar su consulta en el siguiente formulario. Le responderemos en 24 horas.
Productos relacionados