Hogar
>
Productos > Giroscopio de fibra óptica > Giroscopio de fibra óptica > Unidad de medición de inercia Mems de niebla de giroscopio de fibra óptica
Productos
nuevos productos





Unidad de medición de inercia Mems de niebla de giroscopio de fibra óptica
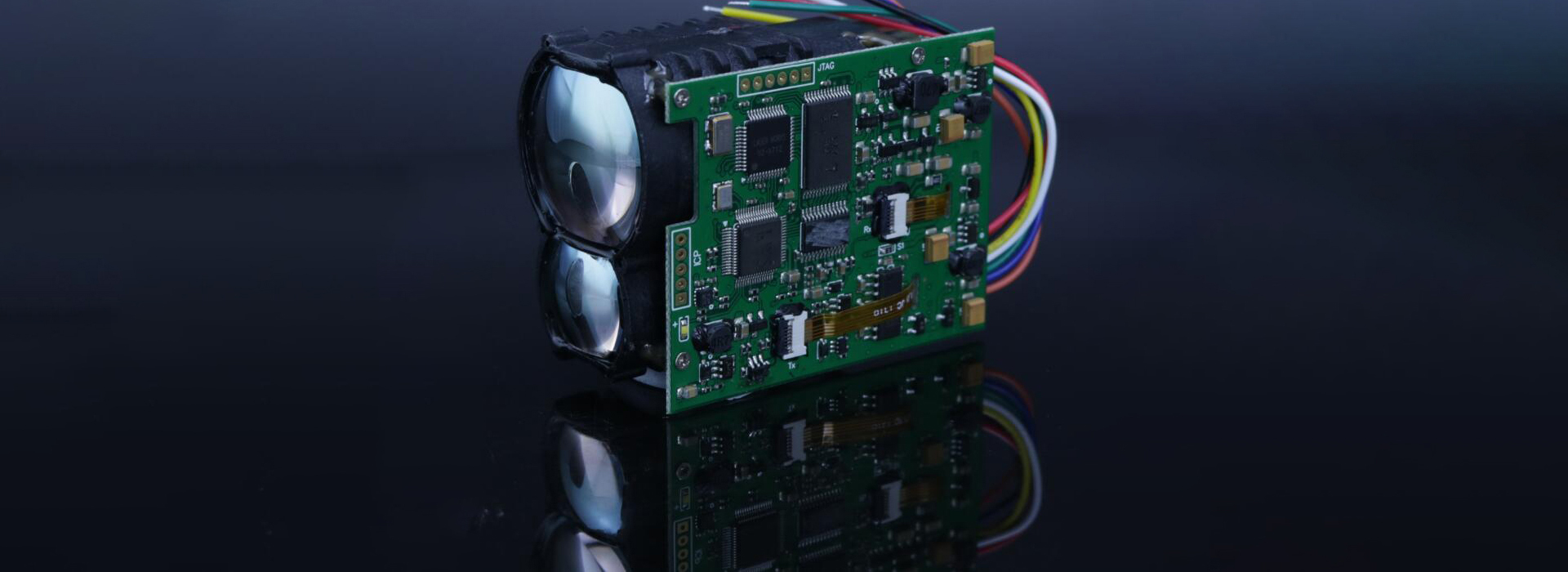
JIO-MC200-IMU es una unidad de medición inercial (IMU) basada en tecnología micromecánica (MEMS) con un giroscopio MEMS de alto rendimiento incorporado y un acelerómetro MEMS que genera velocidad angular de 3 ejes y aceleración de 3 ejes. Bienvenido a comprarnos una unidad de medición inercial de niebla de giroscopio de fibra óptica.
Modelo:JIO-MC200-IMU
Enviar Consulta
Descripción del Producto
Giroscopio de fibra óptica Niebla Mems Unidad de medición inercial Descripción general
JIO-MC200-IMU es una unidad de medición inercial (IMU) basada en tecnología micromecánica (MEMS) con un giroscopio MEMS de alto rendimiento incorporado y un acelerómetro MEMS que genera velocidad angular de 3 ejes y aceleración de 3 ejes.
JIO-MC200-IMU tiene una excelente adaptabilidad sexual y ambiental. A través de la combinación de diferentes software, los productos pueden ser ampliamente utilizados en municiones guiadas, vehículos aéreos no tripulados tácticos e industriales, vehículos aéreos no tripulados, buscadores, conducción autónoma de automóviles.
La instalación de JIOPTICS de giroscopio de fibra óptica para proporcionar flexibilidad de integración fácil, y nuestro kit de herramientas de desarrolladores para la creación rápida de prototipos, no solo cumple con los requisitos de especificación, también proporciona un rendimiento de alta calidad que satisface la demanda de los usuarios finales.
JIO-MC200-IMU tiene una excelente adaptabilidad sexual y ambiental. A través de la combinación de diferentes software, los productos pueden ser ampliamente utilizados en municiones guiadas, vehículos aéreos no tripulados tácticos e industriales, vehículos aéreos no tripulados, buscadores, conducción autónoma de automóviles.
La instalación de JIOPTICS de giroscopio de fibra óptica para proporcionar flexibilidad de integración fácil, y nuestro kit de herramientas de desarrolladores para la creación rápida de prototipos, no solo cumple con los requisitos de especificación, también proporciona un rendimiento de alta calidad que satisface la demanda de los usuarios finales.
Nuestros servicios
JIOPTICS es un equipo profesional y eficiente. Proporcione servicios de OEM/ODM para usted, contáctenos para personalizar su exclusivo giroscopio de fibra óptica
Características del producto
1) giroscopio digital de tres ejes:
a)±450º/s rango de medida dinámico;
b) Estabilidad de polarización cero: 20°/h (GJB,10S);
2) Acelerómetro digital de tres ejes:
a) rango de medición dinámico de ± 16 g;
b) Estabilidad de polarización cero: 0,5 mg (GJB, 10S);
3)Alta fiabilidad: MTBF
4) Rango completo de temperatura (-40â~70â) para garantizar la precisión: algoritmo integrado de compensación y calibración de temperatura de alto rendimiento;
5)Adecuado para trabajar en condiciones de fuerte vibración;
6) Interfaz UART de 1 vía
a)±450º/s rango de medida dinámico;
b) Estabilidad de polarización cero: 20°/h (GJB,10S);
2) Acelerómetro digital de tres ejes:
a) rango de medición dinámico de ± 16 g;
b) Estabilidad de polarización cero: 0,5 mg (GJB, 10S);
3)Alta fiabilidad: MTBF
4) Rango completo de temperatura (-40â~70â) para garantizar la precisión: algoritmo integrado de compensación y calibración de temperatura de alto rendimiento;
5)Adecuado para trabajar en condiciones de fuerte vibración;
6) Interfaz UART de 1 vía
Campo de aplicación
1)Municiones guiadas
2) Buscador
3) drones tácticos e industriales
4) piloto automático
2) Buscador
3) drones tácticos e industriales
4) piloto automático
Características electricas
- Fuente de alimentación: entrada de voltaje amplio 12 ~ 36V
- Potencia nominal: 24W (máx.)
- Potencia nominal: 24W (máx.)
Métricas del producto
| Parámetros |
Condiciónes de la prueba |
Mínimo |
Valor típico |
Valor máximo |
Unidades |
|
| giroscopio |
Rango de medición dinámico |
|
|
450 |
|
°/s |
| Estabilidad de sesgo cero |
Promedio de 10 s (-40â~ 70â, temperatura constante) |
|
20 |
|
°/hora |
|
| Sesgo cero |
Rango de sesgo cero |
|
/ - 0.2 |
|
°/s |
|
| Desviación cero â en todo el rango de temperatura |
|
/ - 0.1 |
|
°/s |
||
| Repetibilidad para arranques sucesivos, eje Z |
|
30 |
|
°/hora |
||
| Efecto de la aceleración lineal en el sesgo cero |
|
10 |
|
°/h/g |
||
| Vibración â¡ con efecto de polarización cero, antes y después del cambio de vibración |
|
10 |
|
°/h/g |
||
| Vibración â¡ a efecto de polarización cero, vibración tras cambio de vibración |
|
10 |
|
°/h/g |
||
| Factor de escala |
El factor de escala no es lineal |
|
500 |
|
ppm |
|
| Precisión del factor de escala |
|
2000 |
|
ppm |
||
| Densidad de ruido |
|
|
0.003 |
|
°/Hz/s) |
|
| Resolución |
|
|
3.052 x 10â7 |
|
°/s/LSB |
|
| Acelerómetro |
Rango de medición dinámico |
|
|
16 |
|
g |
| Estabilidad de sesgo cero |
Promedio de 10 s (-40â~ 70â, temperatura constante) |
|
0.5 |
|
miligramos |
|
| Sesgo cero |
Rango de sesgo cero |
|
5 |
|
miligramos |
|
| Desviación cero en el rango de temperatura completo |
|
5 |
|
miligramos |
||
| Repetibilidad de inicios sucesivos |
|
0.5 |
|
miligramos |
||
| Factor de escala |
El factor de escala no es lineal |
|
500 |
|
ppm |
|
| Precisión del factor de escala |
|
2000 |
|
ppm |
||
| Densidad de ruido |
|
|
0.05 |
|
Hz/mg) |
|
| Resolución |
|
|
1.221 x 10â8 |
|
g/LSB |
|
| Otro |
tiempo de arranque |
|
|
2 |
|
s |
| Parámetros |
Condiciónes de la prueba |
Mínimo |
típico |
valor |
valor máximo |
unidades |
| propiedades |
Banda ancha |
|
|
200 |
|
Hz |
| Demora |
|
|
10 |
|
EM |
|
| Interface de comunicación |
UART de 1 vía |
Tasa de baudios |
|
460.8 |
|
kbps |
| Frecuencia de muestreo |
UART |
|
500 |
|
Hz |
|
| Características electricas |
Voltaje |
|
4.8 |
5 |
5.2 |
V |
| El consumo de energía |
|
|
1.5 |
|
W |
|
| Onda |
PÁGINAS |
|
100 |
|
mV |
|
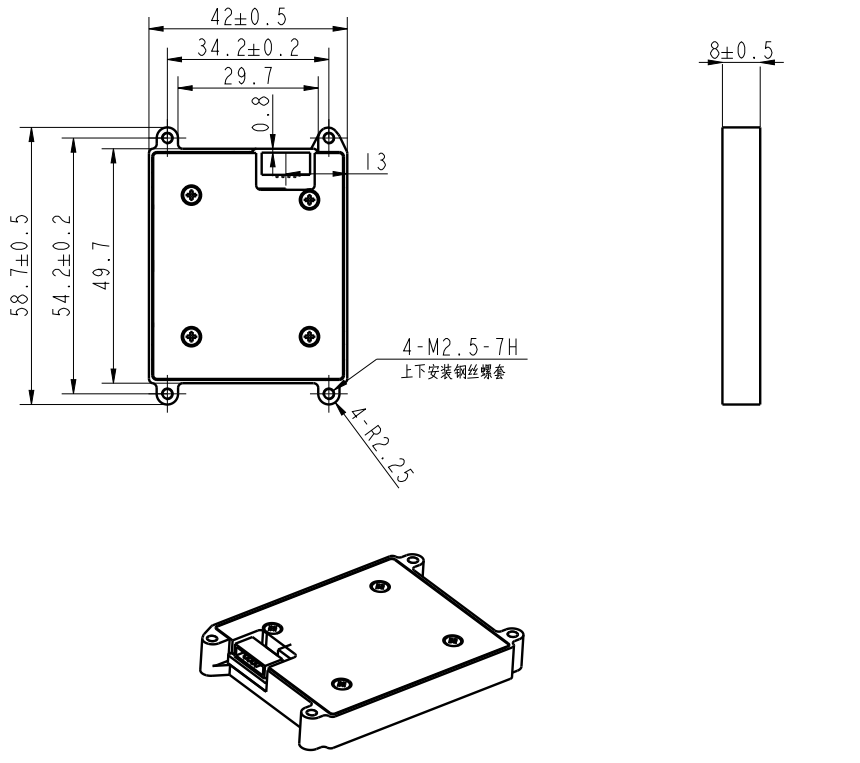
| Características estructurales |
Tamaño |
|
|
58,7x42x8 |
|
milímetro |
| Peso |
|
|
35 |
|
g |
|
| Entorno de uso |
Temperatura de funcionamiento |
|
- 40 |
|
70 |
℃ |
| Temperatura de almacenamiento |
|
- 45 |
|
75 |
℃ |
|
| Vibración |
|
|
20 a 2000 Hz, 6,06 g |
|
|
|
| Impacto |
|
|
500g |
|
|
|
| Entorno de uso |
MTBF |
|
|
20000 |
|
h |
| Horario de trabajo continuo |
|
|
120 |
|
h |
|
| â : Calcule la desviación cero de todo el proceso de variación de temperatura, tasa de variación de temperatura â¤1â/min, rango de temperatura -40â~ 70â; â¡ : la condición de vibración es 6.06g, 20Hz~2000Hz |
||||||
Interfaz eléctrica
Tipo de conector: A1251WR-S-4P;
Los puntos de conexión se definen en la siguiente tabla:
Los puntos de conexión se definen en la siguiente tabla:
| Patas |
Definición |
Funciones |
Observaciones |
|
1 |
5V |
Entrada de alimentación de CC |
|
|
2 |
TIERRA |
a |
|
|
3 |
TX LV-TTL |
Envío de puerto serie |
3,3 V |
|
4 |
RX LV-TTL |
Recepción de puerto serie |
3,3 V |
Interfaz de software
Tasa de baudios: 460800bps;
Frecuencia de envío: 500 Hz;
Formato de datos: bit de datos 8, bit de parada 1, bit sin paridad;
Cuando se transmiten datos, es bajo y luego alto.
Los protocolos de comunicación se muestran en la siguiente tabla:
Frecuencia de envío: 500 Hz;
Formato de datos: bit de datos 8, bit de parada 1, bit sin paridad;
Cuando se transmiten datos, es bajo y luego alto.
Los protocolos de comunicación se muestran en la siguiente tabla:
| byte |
Datos |
Forma |
Resolución |
Observaciones |
|
1 |
0x5A |
Uint8 |
|
|
|
2 |
0x5A |
Uint8 |
|
|
| 3-6 |
Tasa angular X |
flotar |
|
|
| 7-10 |
Tasa angular Y |
flotar |
|
|
| 11-14 |
Tasa angular Z |
flotar |
|
|
| 15-18 |
Tasa angular X |
flotar |
|
|
| 19-22 |
Tasa angular Y |
flotar |
|
|
| 23-26 |
Tasa angular Z |
flotar |
|
|
| 27-30 |
Reservado |
Uint8 |
|
|
|
31 |
Temperatura |
int8 |
1 â |
Rango: -128 a 127 |
|
32 |
y comprobar |
Uint8 |
|
1-31 bytes suman y toman 8 bits menos |
interfaz estructural
Etiquetas calientes: Unidad de medición inercial Mems de niebla de giroscopio de fibra óptica, fabricantes, proveedores, fábrica, China, hecho en China, personalizado, alta calidad
Categoría relacionada
Enviar Consulta
Por favor, siéntase libre de dar su consulta en el siguiente formulario. Le responderemos en 24 horas.
Productos relacionados