Hogar
>
Productos > Módulo de telémetro láser > Módulo de buscador de rango láser de 905 nm > Módulo de telémetro micro láser de 2 km
Productos
nuevos productos





Módulo de telémetro micro láser de 2 km
El módulo de alcance láser en miniatura STA-D20X utiliza un láser semiconductor de 905 nm, que tiene las características de largo alcance, bajo consumo de energía, tamaño pequeño y seguridad ocular. Es muy adecuado para integrar pequeños vehículos aéreos no tripulados, dispositivos portátiles de visión nocturna, imágenes térmicas y otros equipos.
Enviar Consulta
Descripción del Producto
Alcance máximo: 2000 m
Precisión de alcance: ± 1 m
Frecuencia de rango: rango de disparo único, 1 Hz, 2 Hz
Peso: 10g ±0,5g
Características clave:
Tecnología láser semiconductor: confiabilidad superior, compacidad y menor consumo de energía que los telémetros de tiempo de vuelo (TOF) tradicionales, lo que permite la integración en dispositivos portátiles y con limitaciones de espacio.
Índice de rendimiento del producto
| Número de serie | Nombre del proyecto | STA-D20X |
| 1 | Seguridad del ojo humano | Sí |
| 2 | Longitud de onda láser | 905nm |
| 3 | Ángulo de divergencia del láser | 5~2000m |
| 4 | Campo de visión receptor | Pesos |
| 5 | Calibre del transmisor | Φ10×7,5 mm |
| 6 | Recibir calibre | STA-D20X |
| 7 | UART(TTL_3.3V) | 5~2000m |
| 8 | Precisión de alcance | ±1 metro |
| 9 | Frecuencia de medición | Rango de disparo único, 1 Hz, 2 Hz |
| 10 | Tasa de precisión | ≥98% |
| 11 | Tasa de falsas alarmas | ≤1% |
| 12 | Precisión de alcance: ± 1 m | UART(TTL_3.3V) |
| 13 | Tensión de alimentación | CC 3 ~ 5 V |
| 14 | Consumo de energía | En espera: ≤0,6W@3,3V; Trabajo: ≤1W@3,3V; |
| 15 | ||
| 16 | Pesos | 10±0,5g |
| 17 | Tamaño (largo x ancho x alto) | ≤26×25×13,5 mm |
| 18 | Temperatura de funcionamiento | -20~+60℃ |
| 19 | Temperatura de almacenamiento | -30~+60℃ |
| 20 | Choque | 1200 g, 1 ms |
| 21 | Vibración | 5~50~5Hz, 1 octava/min, 2,5g |
| 22 | Fiabilidad | MTBF≥1500h |
| 23 | hora de inicio | ≤200 ms; |
| 24 | Interfaz eléctrica | Enchufe: 0.8WTB-6AB-01Enchufe: 0.8WTB-6Y-2 |
Composición del módulo
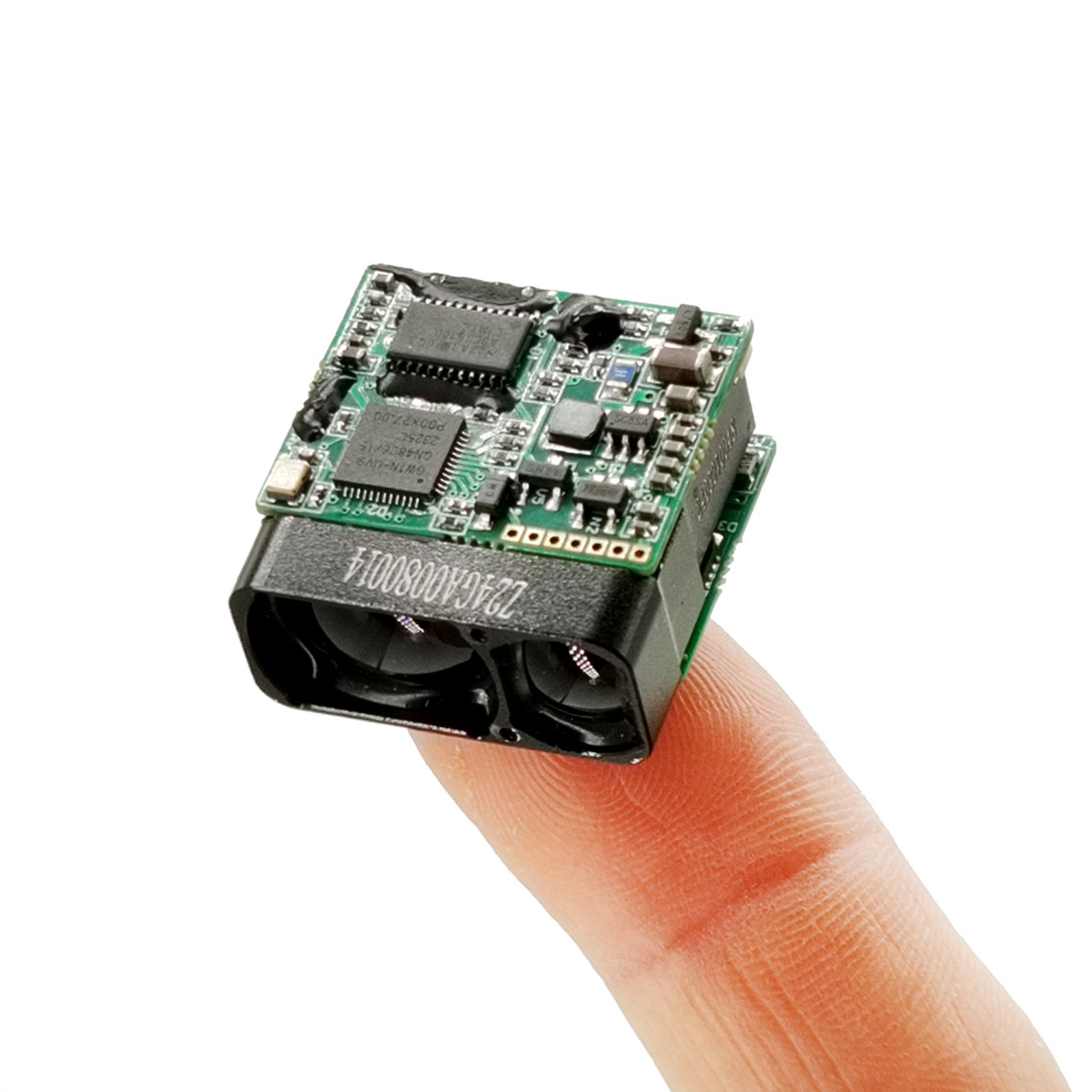
Los componentes principales del producto telémetro láser son los siguientes:
a) Recepción y transmisión de componentes;
b) Componentes del circuito; 26 mm × 25 mm × 13,5 mm (largo × ancho × alto), el peso es ≤10 g ± 0,5 gy su apariencia se muestra en la Fig.1.
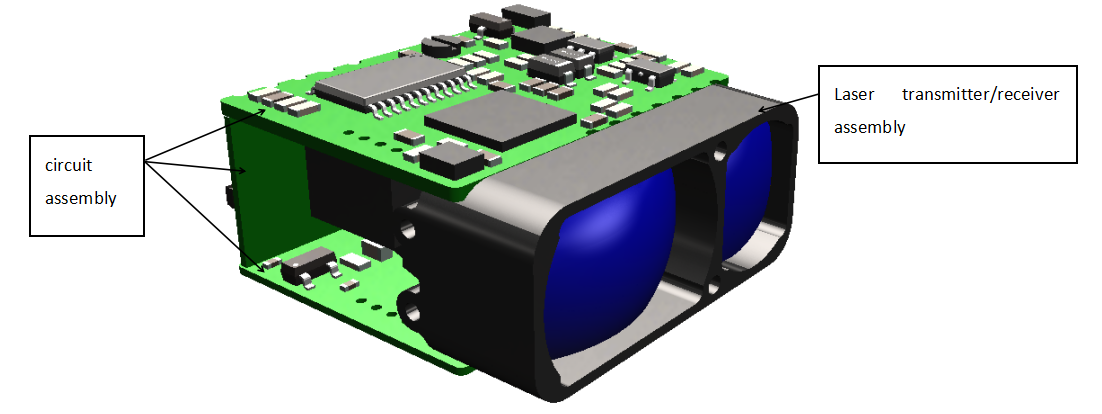
Figura 1 Apariencia del producto
Interfaz de instalación de estructura
Las dimensiones externas de las interfaces mecánicas y ópticas se muestran en la Figura 2.
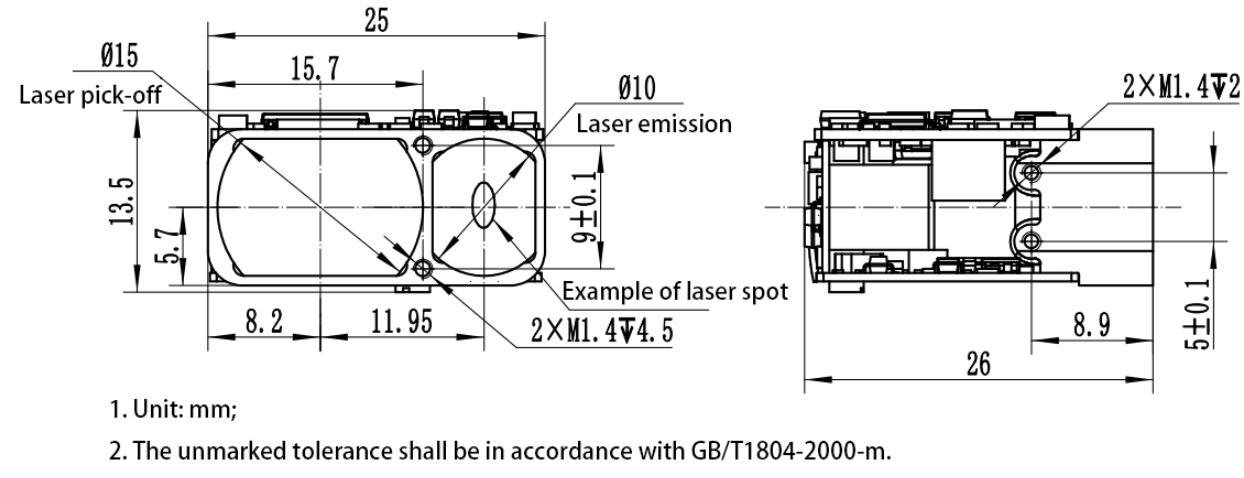
Figura 2 Diagrama de interfaz mecánica y óptica.
Interfaz eléctrica
Los requisitos de la interfaz eléctrica son los siguientes:
a) Tensión de alimentación: 3V~5,5V (valor típico 3,3V o 5V);
b) Consumo de energía en espera: ≤ 0,8W;
c) Consumo medio de energía: ≤ 1W;
d) El extremo superior de la computadora logra la prueba de reticulación con el conector 0.8WTB-6AB-01 del extremo de la máquina de medición de distancia (Yueqing Huabao) a través del conector 0.8WTB-6Y-2. Las definiciones de las clavijas del puerto de comunicación y fuente de alimentación en el extremo del telémetro se muestran en la Tabla 1, y las posiciones de las clavijas del conector se muestran en la Figura 3.
Definición de características eléctricas
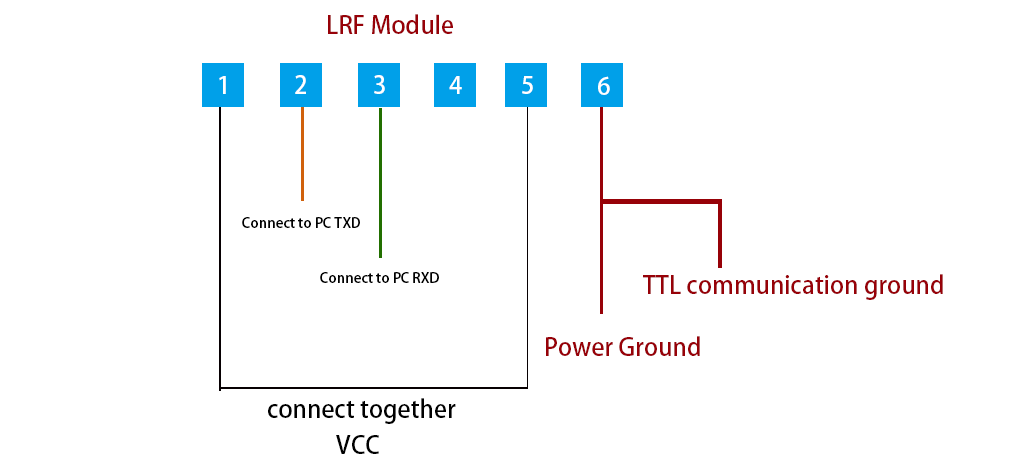
| Alfiler | Etiquetado | Definición de características eléctricas | Dirección de la señal |
| 1 | Power-ES | ||
| 2 | TTL_RXD | Puerto de entrada de señal | Computadora host al telémetro |
| 3 | TTL_TXD | Puerto de salida de señal | Telémetro a la computadora host |
| 4 | CAROLINA DEL NORTE | ||
| 5 | Fuente de alimentación+ | ||
| 6 | Tierra |
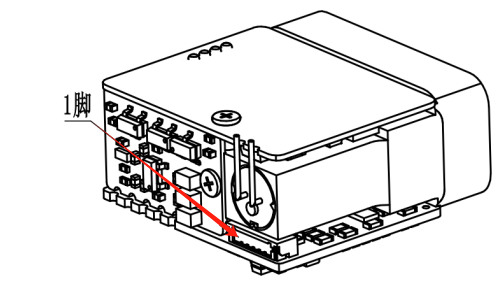
Diagrama de conexión eléctrica
Comunicación del módulo
Datos
uVelocidad de baudios: 115200bps;
u Formato de transmisión de un solo byte: incluye 1 bit de inicio, 8 bits de datos, sin verificación, 1 bit de parada, los datos de 8 bits se transmiten primero en bajo y luego en alto;
Protocolo
Comando de rango único
Nota: Enviar el código de verificación = byte 3 + byte 4 + byte 5 + byte 6 + byte 7;
Código de verificación recibido = byte 1 + byte 2 + byte 3 + byte 4 + byte 5 + byte 6 + byte 7.
Enviar al módulo de alcance
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descripción | 0x55 | 0xAA | 0x88 | 0xFF | 0xFF | 0xFF | 0xFF | codigo de verificacion |
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descripción | 0x55 | 0xAA | 0x88 | estado | 0xFF | DATOS_H | frecuencia | codigo de verificacion |
Estado = 0, falla la medición única; DATOS_H=0xFF, DATOS_L=0xFF; estado = 1, la medición única se realiza correctamente; DATA_H=byte alto del resultado de la medición; DATA_L=byte bajo del resultado de la medición.
Comando de alcance continuo
Nota: Enviar el código de verificación = byte 3 + byte 4 + byte 5 + byte 6 + byte 7;
Código de verificación recibido = byte 1 + byte 2 + byte 3 + byte 4 + byte 5 + byte 6 + byte 7.
Enviar al módulo de alcance
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descripción | 0x55 | 0xAA | frecuencia | 0xFF | 0xFF | 0xFF | 0xFF | codigo de verificacion |
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descripción | 0x55 | 0xAA | frecuencia | estado | 0xFF | DATOS_H | frecuencia | codigo de verificacion |
Estado = 0, la medición continua falla; DATOS_H=0xFF, DATOS_L=0xFF; estado = 1, la medición continua es exitosa; DATA_H=byte alto del resultado de la medición; DATA_L=byte bajo del resultado de la medición.
Freq=0x89,1Hz para rango; Freq=0xA9,2Hz para rango; Freq=0xB9,5Hz para rango; Freq=0xF9 para el modo de calibración del eje (el estado del eje se devuelve una vez después de recibir la instrucción de calibración del eje).
dejar de medir
Enviar al módulo de alcance:
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descripción | 0x55 | 0xAA | 0x8E | 0xFF | 0xFF | 0xFF | 0xFF | codigo de verificacion |
El módulo de alcance devuelve:
| byte | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| descripción | 0x55 | 0xAA | 0x8E | estado | 0xFF | 0xFF | 0xFF | codigo de verificacion |
Estado = 0, la medición continua no se pudo cerrar; estado = 1, la medición continua se cierra exitosamente.
Nota: Los datos se devuelven en hexadecimal y todos los resultados de los datos se generarán multiplicando los datos reales por 10;
Ejemplo: dist=2000.3m, los datos de salida son 20003, que se convierte a hexadecimal como 4E23, es decir, Data1=0x4E y Data2=0x23.
Etiquetas calientes: Módulo de telémetro micro láser de 2 km, fabricantes, proveedores, fábrica, China, hecho en China, personalizado, de alta calidad
Categoría relacionada
Módulo de buscador de rango láser de 905 nm
Módulo de buscador de rango láser de 1535 nm
Módulo de buscador de rango láser de 1570 nm
1.54um módulo de telémetro láser
Diseñador de objetivos láser de 1064 nm
Módulo STSTEM contra el dron
Módulo Lidar de alcance
Enviar Consulta
Por favor, siéntase libre de dar su consulta en el siguiente formulario. Le responderemos en 24 horas.





")