Hogar
>
Productos > Módulo de telémetro láser > Módulo de buscador de rango láser de 905 nm > Módulo de marcador de renovador láser de 1200 m (LRF)
Productos
nuevos productos




")

Módulo de marcador de renovador láser de 1200 m (LRF)
El módulo de retorno de láser en miniatura STA-M se adopta componentes láser semiconductores de 905 nm, con bajo consumo de energía, tamaño pequeño, rendimiento estable y otras características, adecuadas para imágenes térmicas, visión nocturna y otros dispositivos móviles de mano e integración miniaturalizada de equipos UAV POD.
Rango de medición: 5-1200 metros
Medición de árboles ≥1000 metros
Precisión de medición ± 1m
Peso ≤14 ± 0.5g
Enviar Consulta
Descripción del Producto
Los parámetros técnicos se muestran en la siguiente tabla
| Modelo | STA-M010X | |
| Longitud de onda láser | 905 nm | |
| Capacidad de alcance | Edificio | 1200m |
| Árboles | 1000 m | |
| Láser | Seguridad ocular de clase 1 | |
| Mini rango | 5m | |
| Resolución | ± 0.1m | |
| Corriente operativa | ≤90ma | |
| Corriente de espera | ≤20 mM | |
| Consumo de energía | Espera ≤0.09W | |
| Peak≤0.23W | ||
| Interfaz de comunicación | TTL | |
| Temperatura de funcionamiento | · -20 ℃ ~+55 ℃ | |
| Temperatura de almacenamiento | · -30 ℃ ~+60 ℃ | |
| Voltaje de entrada | 3-5V (fuente de alimentación de 5 V recomendada) | |
| Ángulo de divergencia del haz | 5 enfermedades | |
| Frecuencia de alcance | 1-3Hz | |
| Fuerza | ≤1 MW seguro para ojos humanos | |
| Método de rango | Legumbres | |
| Peso | 14 ± 0.5g | |
| Tamaño | Φ23x47 mm | |
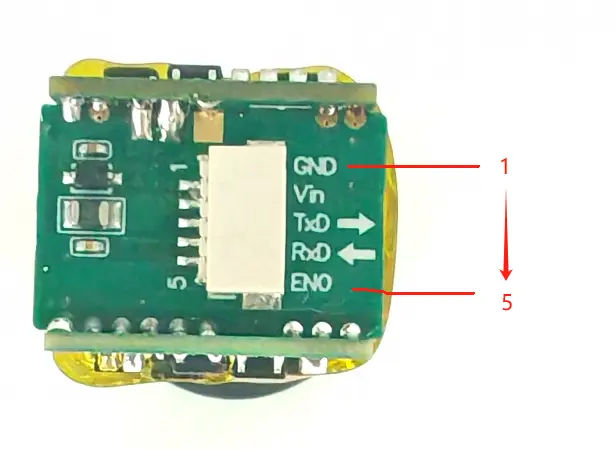
Las interfaces y los pines se definen como se muestra en la siguiente tabla
| Interfaz TTL | |||
| Alfiler | Definición de pin | Describir | Dibujo esquemático |
| 1 | Gnd | Fuente de alimentación - |
|
| 2 | Empuje | Fuente de alimentación + | |
| 3 | TXD | Transmitir datos | |
| 4 | Rxd | Datos recibidos | |
| 5 | Eno | Habilitar PIN, reservado | |
|
|
|
|
|
Gráfico de comando de comunicación del módulo
| Comando maestro | ||
| Código de comando | Descripción | Broadcast Agregar. respuesta |
| 0x80 | Leer el estado del telémetro | NO |
| 0x81 | Leer resultado de medición | NO |
| 0x83 | Empezar a alcanzar | NO |
| 0x84 | Deja de alcanzar | NO |
| 0x9e | Programa de parámetros de comunicación | SÍ |
| 0xbe | Lea el parámetro de comunicación | SÍ |
| 0xc0 | Prueba de comunicación | SÍ |
| 0xc1 | Leer versión de firmware | SÍ |
|
|
|
|
| Respuesta de esclavos | ||
| Código de reconocimiento | Descripción | |
| 0x60 | Marco de respuesta simple | |
| 0x01 | Marco de datos de rango | |
| 0x20 | marco de estado del telémetro | |
| 0x21 | Marco de parámetros de comunicación | |
| 0xe0 | Marco del mensaje de error | |
NOTA
1. El formato de marco de comunicación:
Slaveid + Instrucción + Parámetro + SUMA de verificación
2. El intervalo entre dos marcos adyacentes debe ser al menos el tiempo de 1.5 bytes cuando
enviado, cuando es inferior a 1 m, se considera 1 ms;
600bps: 25 ms
1200bps: 12.5ms
2400bps: 6.25 ms
4800bps: 3.125ms
9600bps: 1.56 ms
19200bps: 1 ms (0.78 ms <1ms, tomar 1ms)
3. Envío de calculación de la suma de verificación;
Este módulo utiliza el modo de verificación de byte por suma de acumulación de byte, Slaveid no es
incluido en la verificación, enviando la suma de verificación por fin.
Como calcular la suma de verificación de la instrucción del modo de escaneo "0x83 0x40":
A. suma de acumulación de calculación: 0x83 + 0x40 = 0xc3;
B.Take LSB [D7..D0]: 0xc3;
C. calcula el complemento de 2: 0x100 - 0xc3 = 0x3d, 0x3d es la suma de verificación;
Agregar dirección esclava cuando Mater envíe: 0x10 0x83 0x40 0x3d
4. Recibo de verificación;
Como el marco de comunicación de recepción: 0x10 0x83 0x40 0x3d, verificación sin incluir
Dirección de esclavos 0x10
A. suma de acumulación de calculación: 0x83 + 0x40 + 0x3d = 0x100;
B. Sume LSB de acumulación: 0x00; 0x00 es resultado de verificación;
Si el resultado de la verificación es 0x00, eso significa que los datos recibidos son correctos; Si el resultado de la verificación
no es 0x00, eso significa que los datos recibidos son incorrectos.
Descripción del comando del módulo
Nota: En el ejemplo, la dirección esclava de cada comando es 0x10; en la aplicación, la dirección de esclavo será la programada.
1 、 Prueba de comunicación (0xc0 );
| El maestro envía | ||
| Código de comando | Parámetro | Descripción |
| 0xc0 | Ninguno |
|
| Respuestas de esclavos | ||
| Código de reconocimiento | Parámetro | Descripción |
| 0x60 | Ninguno |
|
| Ejemplo | ||
| Master envía: 0x10 0xc0 0x40; 0x40 es comprobación Respuesta de esclavos: 0x10 0x60 0xa0; 0xa0 es verificación |
||
2 、 Comando esclavo para comenzar a variar (0x83) ;
| El maestro envía | ||
| Código de comando | Parámetro | Descripción |
| 0x83 | byte1 | D7: Reserva |
| D6: modo de rango continuo, 0 = apagado; 1 = on; | ||
| D5: modo niebla, 0 = apagado; 1 = on; | ||
| D4: Unidad de datos, 0 = medidor; 1 = patio; | ||
| D3 - D0: modo de trabajo, 0 = rango; 1 = velocidad; 2 = modo objetivo pequeño; | ||
| Respuestas de esclavos | ||
| Código de reconocimiento | Parámetro | Descripción |
| 0x60 | Ninguno | Si el esclavo se establece como modo de exportación automática, Slave responde 0x60 primero después de la recepción del comando de inicio de rango, después de que termine el rango, enviará un resultado de rango; |
| Ejemplo | ||
| El maestro envía: 0x10 0x83 0x00 0x7d: el modo 0 es para una sola medida, la unidad de datos es medidor; 0x10 0x83 0x40 0x3d: el modo 0 es para mesura continua, la unidad de datos es medidor; 0x10 0x83 0x10 0x6d: el modo 0 es para una sola medida, la unidad de datos es patio; 0x10 0x83 0x20 0x2d: el modo 0 es para mesura continua, la unidad de datos es patio; Respuesta de esclavos: 0x10 0x60 0xa0; |
||
Nota:1 、 Si el método de exportación de datos del módulo se establece como modo de consulta, entonces solo puede hacer una medida única;
2. En el modo de velocidad, la función de rango continuo es nula, que no es una medida de velocidad continua;
3. El modo FOG solo es válido para el dispositivo con función de modo niebla;
4.Slave enviará el marco de respuesta 0x60 después de la recepción del comando de inicio de rango, comenzará a enviar un resultado de rango después de que se termine el rango.
3 、 Comando Slave Stop Ranging (0x84) ;
| El maestro envía | ||
| Código de comando | Parámetro | Descripción |
| 0x84 | Ninguno |
|
Nota: Después de que el maestro envíe el comando a esclavo para hacer un rango continuo, debe enviar este comando a esclavo para que deje de alcanzar. Si Master envía el comando a Slave para que se rompa un solo tiempo, entonces no es necesario enviar este comando, porque Slave dejará de variarse automáticamente después de que termine el rango.
4 、 Lectura Estado de esclavos (0x80) ;
| El maestro envía | ||
| Código de comando | Parámetro | Descripción |
| 0x80 | Ninguno |
|
| Respuestas de esclavos | ||
| Código de reconocimiento | Parámetro | Descripción |
| 0x20 | byte1 | D7: 1 = Rangefinder ocupado; 0 = rango terminado; D6: 1 = Malfuncia del Ransfinder; 0 = sin mal funcionamiento; D5-D2: Reserva; D1: 0 = Sensor de ángulo prohibido; 1 = Sensador de ángulo habilitado; D0: 0 = El sensor de ángulo es normal; 1 = sensor de ángulo anormal; |
| byte2 | Reservar | |
5 、 Resultado del buscador de rango de lectura (0x81) ;
| El maestro envía | |
| Descripción |
|
|
|
|
| Respuestas de esclavos | |
| Descripción |
|
| D7 :: datos de distancia, 0 = datos válidos; 1 = datos no válidos; D6 :: datos de ángulo, 0 = datos válidos; 1 = datos no válidos; D5: resolución de datos, 0 = 0.5/lsb; 1 = 0.1/lsb; D4: Unidad de datos, 0 = medidor; 1 = patio; D3 - D0: modo de trabajo, 0 = rango; 1 = velocidad; |
|
| Cuando la distancia es válida: distancia [D15..D8]; Cuando la distancia no es válida: 0x80 = rango sin resultado; 0x81 = error del sistema; |
|
| Cuando el ángulo es válido: distancia [d7..d0]; Cuando el ángulo no es válido: reserva; |
|
|
|
|
| Ejemplo | |
| 1 、 Slave envía un marco de distancia: 0x10 0x01 0x60 0x12 0xd7 0xb6 valor de distancia = 0x12d7 = 4823 = 482.3m 2 、 Slave envía marco de velocidad: 0x10 0x01 0x21 0x03 0xd7 0x04 valor de velocidad = 0x03d7 = 983 = 98.3km/h 3 、 Slave envía un marco de distancia: 0x10 0x01 0xe0 0x80 0x00 0x9f El valor de distancia no es válido (el primer byte es 0xe0, d7 = 1) |
|
6 、 Escribir la tasa de baudios de comunicación de esclavos (0x9e), la configuración de fábrica es 19200bps ;
| El maestro envía | ||
| Código de comando | Parámetro | Descripción |
| 0x9e | byte1 | tiene que ser 0x90 |
| byte2 | Reservar | |
| Byte3 | Reservar | |
| byte4 | Configuración de tasa de baudios: 0 = 1200bps; 1 = 2400bps; 2 = 4800bps; 3 = 9600bps; 4 = 19200bps (predeterminado); |
|
| Respuestas de esclavos | ||
| Código de reconocimiento | Parámetro | Descripción |
| (Consulte la parte de respuestas de esclavos del parámetro de esclavo de lectura) | ||
| Ejemplo | ||
| Si el maestro envía marco: 0x10 0x9e 0x90 0x00 0x00 0x04 0xce; Es medios: establecer una tasa de esclavo de Baud como 19200bps, | ||
Nota: La nueva tasa de baudios solo es válida después de que se reinicie el módulo;
7 、 Escriba la dirección esclava (0x9e), Configuración de fábrica: 0x10 ;
| El maestro envía | ||
| Código de comando | Parámetro | Descripción |
| 0x9e | byte1 | Debe ser 0x91 |
| byte2 | Reservar | |
| Byte3 | Reservar | |
| byte4 | esclava nueva dirección; | |
| Respuestas de esclavos | ||
| Código de reconocimiento | Parámetro | Descripción |
| (Consulte la parte de respuestas de esclavos del parámetro de esclavo de lectura) | ||
| Ejemplo | ||
| Para escribir la dirección del esclavo como 0x20, luego el maestro envía: 0x10 0x9e 0x91 0x00 0x00 0x20 0xb1 | ||
Nota:1. La nueva dirección esclava es válida después de reiniciar el dispositivo
2. 0x00 es la dirección de transmisión, por lo que la dirección de esclavos no se puede configurar como 0x00;
3. La dirección de esclavo predeterminada es 0x10;
8 、 Escriba el método de exportación de resultados medidos (0x9e) ;
| El maestro envía | ||
| Código de comando | Parámetro | Descripción |
| 0x9e | byte1 | Debe ser 0x92 |
| byte2 | Reservar | |
| Byte3 | Reservar | |
| byte4 | Método de exportación de resultados medido selectiong: 0 = Modo de consulta (el esclavo solo puede exportar datos cuando el maestro envía el comando de lectura) 1 (predeterminado) = modo automático (después de que termine, envía datos automáticamente); |
|
| Respuestas de esclavos | ||
| Código de reconocimiento | Parámetro | Descripción |
| (Consulte la parte de respuestas de esclavos del parámetro de esclavo de lectura) | ||
| Ejemplo | ||
| Para cambiar la exportación de datos a la exportación automática, luego el maestro envía: 0x10 0x9e 0x92 0x00 0x00 0x01 0xcf | ||
9 、 Establezca UART IO Voltage (0x9e), Configuración de fábrica: 3.3V ;
| Ejemplo | ||
| Código de comando | Parámetro | Descripción |
| 0x9e | byte1 | Debe ser 0x93 |
| byte2 | Reservar | |
| Byte3 | Reservar | |
| byte4 | Configuración de voltaje de UART IO: 72 - 199, 0.025V/LSB; | |
| Respuestas de esclavos | ||
| Código de reconocimiento | Parámetro | Descripción |
| (Consulte la parte de respuestas de esclavos del parámetro de esclavo de lectura) | ||
| Ejemplo | ||
| Cambie el voltaje de UART IO a 3.3V, luego el maestro envía: 0x10 0x9e 0x93 0x00 0x00 0x84 0x4b | ||
Nota: vio = configuración * 0.025V, predeterminado VIO = 3.3V
10 、 Parámetro de comunicación de lectura (0xbe) ;
| El maestro envía | ||
| Código de comando | Parámetro | Descripción |
| 0xbe | byte1 | Debe ser 0x91 o 0x92 |
| Respuestas de esclavos | ||
| Código de reconocimiento | Parámetro | Descripción |
| 0x21 | byte1 | Dirección de esclavos: 0x01 - 0xff |
| byte2 | D4: método de exportación de datos; D3 - D0: configuración de velocidad de baudios; |
|
| Byte3 | Configuración de voltaje de UART IO | |
11 、 Slave envía información incorrecta (0xe0 );
| Respuestas de esclavos | ||
| Código de reconocimiento | Parámetro |
|
| 0xe0 | byte1 | D7 - D3: Reserva; D2: 1 = error de parámetro de comunicación; D1: 1 = Commmand irreconocible; D0: 1 = error de suma de verificación; |
12 、 Lea la versión de firmware (este comando fue compatible solo en V7.00 o versión más nueva;) ;
| El maestro envía | ||
| Código de comando | Parámetro |
|
| 0xc1 | Ninguno |
|
| Respuestas de esclavos | ||
| Código de reconocimiento | Parámetro | Notas |
| 0x61 | byte0 | Versión de mayo (BCD) |
| byte1 | Versión menor (BCD) | |
| Ejemplo | ||
| Respuestas de esclavos: 0x10 0x61 0x07 0x00 0x98 Datos "0x07 0x00" significa que la versión de firmware es V7.00. |
||
Etiquetas calientes: Módulo de marcador de renovador láser de 1200 m (LRF), fabricantes, proveedores, fábrica, China, fabricado en China, personalizado y de alta calidad
Categoría relacionada
Módulo de buscador de rango láser de 905 nm
Módulo de buscador de rango láser de 1535 nm
Módulo de buscador de rango láser de 1570 nm
1.54um módulo de telémetro láser
Diseñador de objetivos láser de 1064 nm
Módulo STSTEM contra el dron
Módulo Lidar de alcance
Enviar Consulta
Por favor, siéntase libre de dar su consulta en el siguiente formulario. Le responderemos en 24 horas.





")